
北京靈思創(chuàng)奇科技有限公司

<tfoot id="qqie6"></tfoot>
<ul id="qqie6"></ul> 北京靈思創(chuàng)奇科技有限公司





| 參 考 價 | 面議 |
產(chǎn)品型號LINKS_RT
品 牌
廠商性質(zhì)生產(chǎn)商
所 在 地北京市
聯(lián)系方式:劉文鋒查看聯(lián)系方式
更新時間:2021-01-14 11:54:20瀏覽次數(shù):524次
聯(lián)系我時,請告知來自 儀表網(wǎng)| 產(chǎn)地 | 國產(chǎn) | 加工定制 | 是 |
|---|
一、產(chǎn)品概述
實時仿真機(jī)是一種嵌入式工業(yè)計算機(jī),具備豐富的I/O資源,并運行嵌入式實時操作系統(tǒng)。面向不同的應(yīng)用場景,我公司提供多種類型的實時仿真機(jī)供用戶選擇。
二、特征優(yōu)勢
1、支持RCP快速原型設(shè)計
實現(xiàn)用戶的Matlab/Simulink仿真模型到嵌入式控制原型的自動轉(zhuǎn)換;
2、支持HIL硬件在回路測試
用戶的控制器等實物設(shè)備可以直接與Links-Box快速原型仿真器連接,動態(tài)驗證實物控制器性
一、平臺概述
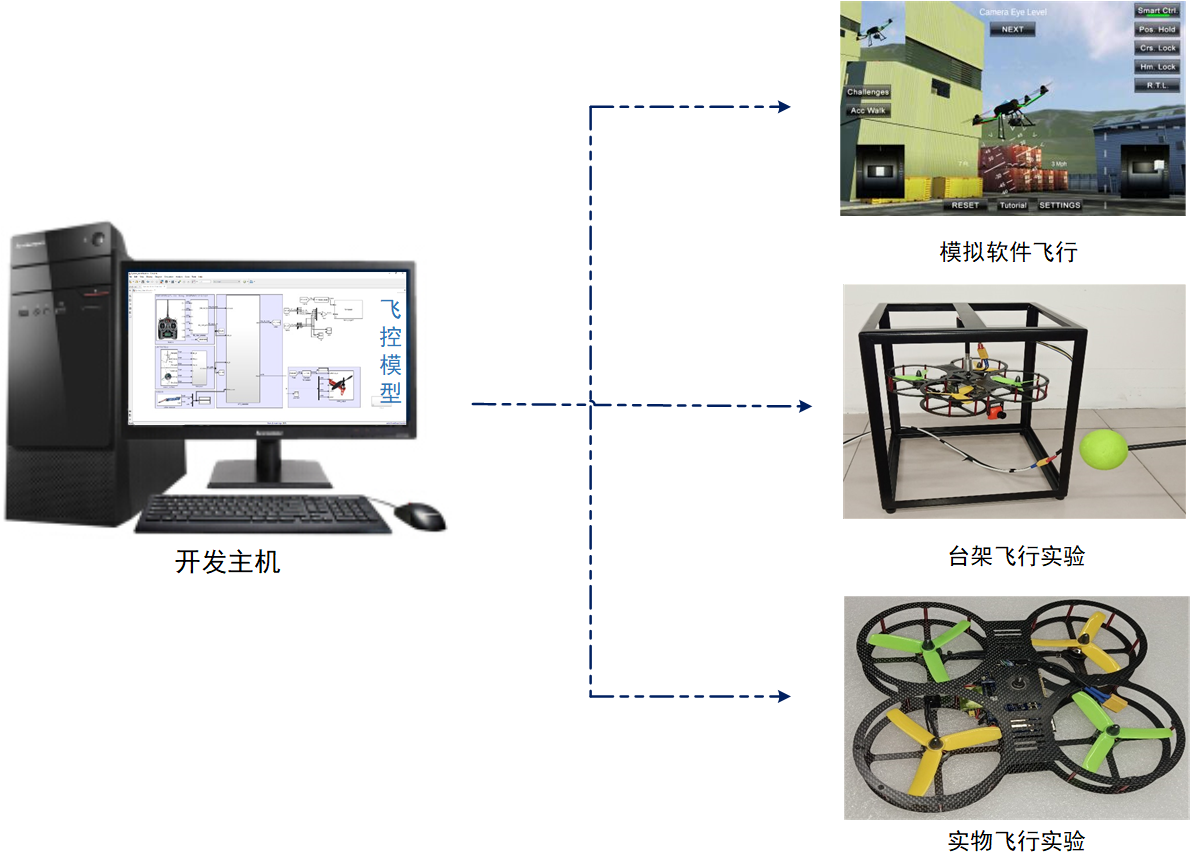
四旋翼飛行控制實驗平臺是集教學(xué)與科研目的為一體的多功能實驗臺,其在滿足日常學(xué)生教學(xué)實驗的同時,兼顧無人機(jī)平臺姿態(tài)控制、制導(dǎo)導(dǎo)航、力學(xué)等學(xué)科專業(yè)的科學(xué)研究。本平臺采用*的基于模型的設(shè)計(MBD)開發(fā)思路,可支撐控制系統(tǒng)數(shù)學(xué)仿真實驗、模擬軟件飛行實驗、臺架實驗、實物飛行實驗,具備模型編譯、下載、數(shù)據(jù)監(jiān)視記錄、后處理等完成的工具軟件,能夠幫助學(xué)生熟悉整套控制系統(tǒng)設(shè)計流程。
二、特征優(yōu)勢
1、基于模型設(shè)計(MBD)
平臺采用*的基于模型設(shè)計(MBD)的開發(fā)思路;
2、實驗支撐
同時支持?jǐn)?shù)學(xué)仿真實驗、模擬軟件飛行實驗、臺架實驗和實物飛行實驗;
3、硬件配置
主控芯片采用功能強(qiáng)大和擴(kuò)展性強(qiáng)的芯片AM335x 1GHz ARM® Cortex-A8 processor,擁有豐富的外設(shè)資源和強(qiáng)大的運算能力;
4、圖像處理
具備前置攝像頭,結(jié)合圖形處理芯片,完成圖像采集和實時處理;
5、控制器開發(fā)
結(jié)合基于MATLAB Simulink和ARM的快速控制原型系統(tǒng)的使用,可以快速實現(xiàn)控制器的開發(fā),自動代碼生成。
三、實驗內(nèi)容
1、建模實驗
?仿真實物分析實驗 ?油門響應(yīng)對比實驗 ? 數(shù)據(jù)分析建模實驗
2、濾波實驗
?互補(bǔ)濾波實驗 ?濾波參數(shù)對比實驗 ?卡爾曼濾波實驗
3、姿態(tài)控制實驗
?系統(tǒng)穩(wěn)定分析實驗 ?PID參數(shù)調(diào)節(jié)實驗 ?矯正器設(shè)計驗證實驗
4、圖像跟蹤實驗
?RGB圖像分析實驗 ?HSV圖像分析實驗 ?視覺伺服跟蹤實驗
四、實驗示例
1、IMU數(shù)據(jù)獲取與姿態(tài)解算
1)實驗?zāi)康?/p>
?熟悉IMU傳感器基本原理; ?學(xué)習(xí)基本kalman濾波的原理和應(yīng)用。
2)實驗原理
飛行器姿態(tài)(滾轉(zhuǎn)、俯仰、偏航角)測值并非直接來源于機(jī)上傳感器,而是依據(jù)姿態(tài)測量原理,由集成傳感器的原始測值經(jīng)過‘vehicle_attitude’模塊內(nèi)置姿態(tài)計算方法計算后得到。該模塊內(nèi)置了兩種姿態(tài)計算方法,基于加速度計、陀螺儀和磁力計測值的默認(rèn)計算方法和擴(kuò)展卡爾曼濾波器(Extended Kalman Filter)。
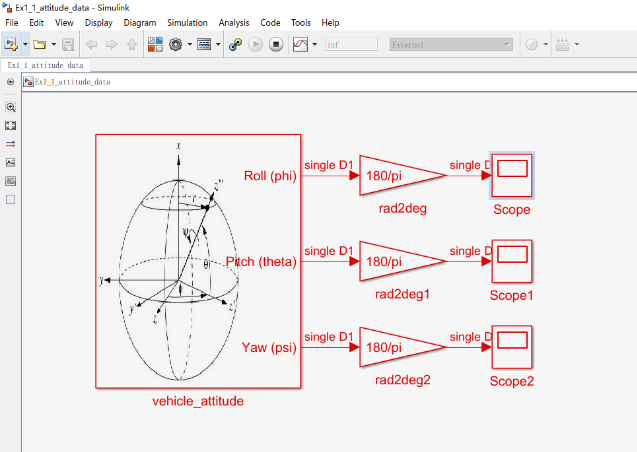
姿態(tài)測量模型
3)實驗過程
A.數(shù)值仿真實驗
Step1: 直接運行
Step2: 打開示波器,結(jié)果如下圖所示,從結(jié)果可以看出,估計值能夠很好的符合實際值。
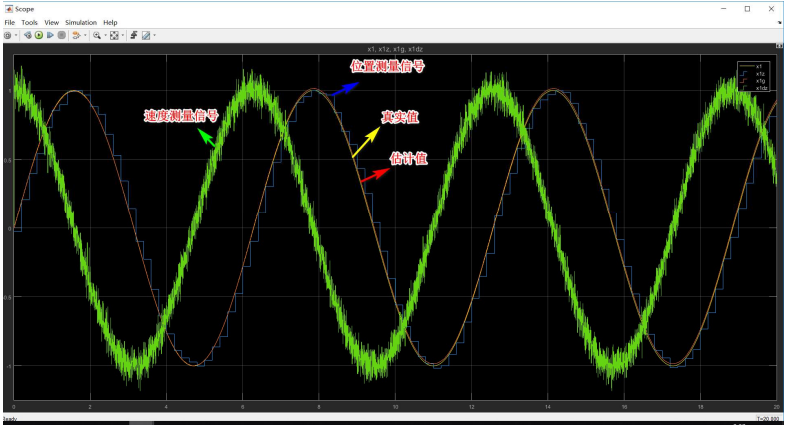
卡爾曼數(shù)值仿真實驗結(jié)果
B.臺架實物實驗
Step1: 打開Simulink模型
Step2: 無人機(jī)實物上電
Step3: 編譯下載模型,上傳固件信息
Step4: 手動擺動四旋翼,在Simulink監(jiān)控界面觀察上傳的四旋翼姿態(tài)數(shù)據(jù)
Step5: 停止模型
Step6:關(guān)閉無人機(jī)。
2、基于顏色的綠球跟蹤實驗
1)實驗?zāi)康?/p>
?了解跟蹤控制基本原理 ?了解圖像處理基本過程 ?了解分層控制器的設(shè)計思想
2)實驗原理
以前置相機(jī)中的綠球為跟蹤對象,其目的是保持綠球在圖像的中心位置(坐標(biāo)原點)。當(dāng)綠球在圖像中左右移動時會產(chǎn)生一個x方向的位移,將此作為偏差輸入PID控制器產(chǎn)生一個偏航角的控制量,作為姿態(tài)控制器的期望值。當(dāng)綠球在圖像中上下移動時會產(chǎn)生一個y軸方向的位移,將此作為偏差輸入PID控制器產(chǎn)生一個俯仰角的控制量,作為姿態(tài)控制器的期望值。經(jīng)過兩個PID控制器,將使得綠球能夠保持在圖像的中心,移動綠球,無人機(jī)的機(jī)頭就會跟隨移動,這就是綠球跟蹤的基本原理。
如下圖所示,綠球跟蹤控制系統(tǒng)采用分層控制思想,上層為綠球跟蹤控制器(BBB板載ARM處理器),下層為無人機(jī)姿態(tài)控制器(BBB板載GPU處理器),上層的控制器輸出作為下一層控制器的給定輸入。
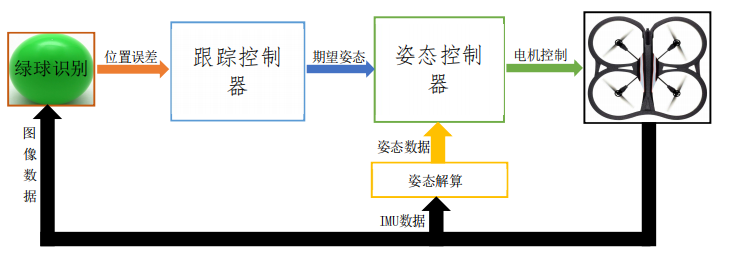
綠球跟蹤控制系統(tǒng)原理圖
3)實驗過程
Step1:打開模型
Step2:無人機(jī)實物上電
Step3:編譯下載模型,上傳固件
Step4:運行模型
Step5:運動綠球,觀察無人機(jī)跟蹤情況
Step6:調(diào)整PID控制器參數(shù),優(yōu)化跟蹤效果
Step7:停止模型
Step8:關(guān)閉無人機(jī)
4)實驗討論:
?分層控制的設(shè)計思路和特點 ?將顏色跟蹤改為形狀跟蹤甚至人臉跟蹤等。
五、選型配置
產(chǎn)品名稱 | 產(chǎn)品型號 | 系統(tǒng)配置 | |
四旋翼飛行控制實驗平臺 | LINKS-ES-UAV-01 (基礎(chǔ)教學(xué)) | 無人機(jī)實驗臺架 | Links-UAV-MiniBench |
飛控代碼自動化生成工具 | Links-AutoCoder-Gen | ||
飛控外設(shè)模型庫 | Links-AutoCoder-DevLib | ||
Simulnk實驗示例包 | Links-UAV-SimulinkDemo | ||
模擬飛行軟件 | Links-UAV- Flight Software | ||
四旋翼無人機(jī)(選配) | Links-UAV- MiniRealPlane | ||
LINKS-RS-UAV-01 (教學(xué)/科研) | 無人機(jī)實驗臺架 | Links-UAV-LargeBench | |
飛控代碼自動化生成工具 | Links-AutoCoder-Gen | ||
飛控外設(shè)模型庫 | Links-AutoCoder-DevLib | ||
Simulnk實驗示例包 | Links-UAV-SimulinkDemo | ||
模擬飛行軟件 | Links-UAV- Flight Software | ||
四旋翼無人機(jī)(選配) | Links-UAV- LargeRealPlane | ||
六、部分用戶
?北京航空航天大學(xué) ?西北工業(yè)大學(xué) ?華東交通大學(xué) ?桂林航天工業(yè)學(xué)院 ?中南大學(xué) ?重慶大學(xué) ?南昌航空大學(xué)
?北京理工大學(xué) ?中北大學(xué) ?北京聯(lián)合大學(xué) ?臺州學(xué)院 ?濱州學(xué)院 ?滇西科技師范學(xué)院
?北京信息科技大學(xué) ?廣西大學(xué) ?西南交通大學(xué) ?*南海海洋研究所 ?哈爾濱工業(yè)大學(xué) ?中山大學(xué)珠海學(xué)院


您感興趣的產(chǎn)品PRODUCTS YOU ARE INTERESTED IN

儀表網(wǎng) 設(shè)計制作,未經(jīng)允許翻錄必究 .? ? ?
請輸入賬號
請輸入密碼
請輸驗證碼









